Chargement dans le
Google Play
Physique/Chimie
Français
Histoire
SVT
SES
Mouvements et interactions
Constitution et transformations de la matière
Propriétés physico-chimiques
Les circuits électriques
Énergie : conversions et transferts
L'organisation de la matière dans l'univers
Les états de la matière
Structure de la matière
Vision et image
Les signaux
Lumière, images et couleurs
Ondes et signaux
Les transformations chimiques
Constitution et transformation de la matière
L'énergie
Affiche tous les sujets
Le monde depuis 1945
Le xviiième siècle
Le xixème siècle
La guerre froide
Nouveaux enjeux et acteurs après la guerre froide
La méditerranée de l'antiquité au moyen-age
Le nouveau monde
Les religions du vième au xvème siècle
Une nouvelle guerre mondiale
La crise et la montée des régimes totalitaires
Les guerres mondiales
La france et la république
Le monde de l'antiquité
La 3ème république
Révolution et restauration
Affiche tous les sujets
Le mouvement
La génétique
Reproduction et comportements sexuels responsables
Diversité et stabilité génétique des êtres vivants
Transmission, variation et expression du patrimoine génétique
La cellule unité du vivant
Le monde microbien et la santé
La géologie
Corps humain et santé
Unité et diversité des êtres vivants
Procréation et sexualité humaine
Nutrition et organisation des animaux
Nourrir l'humanité : vers une agriculture durable pour l'humanité ?
La planète terre, l'environnement et l'action humaine
Affiche tous les sujets
Comment les économistes, les sociologues et les politistes raisonnent-ils et travaillent-ils ?
Quels sont les processus sociaux qui contribuent à la déviance ?
La coordination par le marché
Comment la socialisation contribue-t-elle à expliquer les différences de comportement des individus ?
Comment devenons-nous des acteurs sociaux ?
Comment crée-t-on des richesses et comment les mesure-t-on ?
La croissance économique
Quelles relations entre le diplôme, l'emploi et le salaire ?
Comment se forment les prix sur un marché ?
Comment s'organise la vie politique ?
La monnaie et le financement
Vote et opinion publique
Les sociétés developpées
Comment se construisent et évoluent les liens sociaux ?
Affiche tous les sujets
28/04/2022
2805
159
Partager
Enregistrer
Télécharger


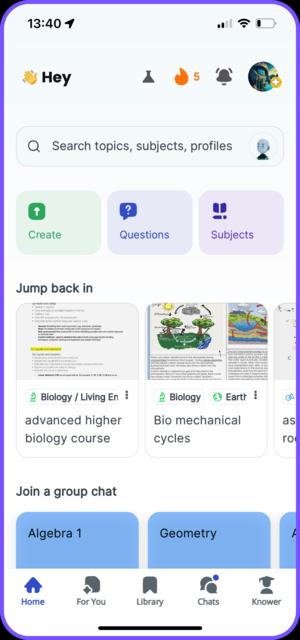
Céline Zhou TⓇE ère 9 19 opm loi de Newton T → Référentiel = galileen si le principe d'inertie sy applique, cad st la somme des forces qui s'exercent sur a système matériel est nulle, alors le centre d'inertie du système G est anime d'un mut R et Uni. - alors systeme all repos EF=0 G EF = 0 65G = constant alors système dans un MRU gemeloi de Newton →→Ds un référentiel galitéen, la somme de fext appliquées à un système mécanique est égale au produit de la masse du système par le vecteur accelerat de son centre d'inertie : Σ Pext = mx dig A a respecter l'énonce si c'est mou M Mouvement dans un champ de pesanteur uniforme 2个 i mit dans un champ uniforme دعی 167 4 1α ах ау ук Jamais dans le cas d'un MRU). Exo type: Methode *Le référentiel adaple à l'étude de ce mut est le réf terrestre, supposee galileen. Le système est le dauphin de masse m et de cente d'inertie G. → CHAP 6 projete) asi on projette , al est dans le sens contraire à s c'est un repère suppose galileen H • * Comme ref galileen, la de loi de Newton s'applique - Efext = mxa² D'après l'enonce, il n'est soumis qu'à son poids donc = mxã G → mxa mxg & Fext = P (=) P Dans le repère d'étude (0, 2, 3), on as $ [a] - Dans ce cas, les frottements sont négligeables (4) [ax=0 A si repère (0,ijk) alors a ay =0 of...

Louis B., utilisateur iOS
Stefan S., utilisateur iOS
Lola, utilisatrice iOS
-g O ・g +0 On sait que a v (t) √ Gx(+) = k₁ { P *- dat dt 8 vy(t) = − gxt + k₂ (0,7,32²) 0₂ (t) = -gxt + k3 Les constantes i et k₂ se trawent à la vitesse initiale soit t = 0s ² (Vox = Vo x cosa 2 Voy=0 Joxsina Joy No <-> Voy = Vo x sind i ✓ Vox = k₁ = No x cos x si repère To + 0 U ( R₂ Vox sind y ↑ Joy . Voz x Nox 7 On sait que u cosa Vobc Vo (=> Vox = Vox cosa donc la vitesse est la primitive de I'' acceleration. U₂ (t) = k₁ 71 - 13 J (t) √ √₂. (t) = No x cos x UyCĐ) Tgxt + Vex sind 아 o e h finalement, expression littérale de o(t) en fonct° Vo, x, g, to T dom dt 71 X OM(+) √x (t) = V₁ x cos a xt + k 3 sin α = 의 h donc la position est la primitive de la vitesse OM (0) x (0) = Vox sind x 0 + R₂ y (0) = -1 2 (y (t) = - 1 xgx t² + Vo x sin α xt + ku 21 xes constantes kg et ku se trawent à l'état initiale (coordonnées, les valeurs sont variables selon les sujets, mais souvent (0;0) 7 comme coor- g x 0²² + V₁ x sina x 0 + R₂ Soonnée (0;0) alors 1₂ = ky = 0 Finalement, les équat horaires x (t) et y(F) du mauvement du centre d'inertie OM (1) { x (t) = Vo x cosa x t y (t) = - = gt² + Vc x sin d x t 1 2