Chargement dans le
Google Play
Physique/Chimie
Français
Histoire
SVT
SES
Mouvements et interactions
Constitution et transformations de la matière
Propriétés physico-chimiques
Les circuits électriques
Énergie : conversions et transferts
L'organisation de la matière dans l'univers
Les états de la matière
Structure de la matière
Vision et image
Les signaux
Lumière, images et couleurs
Ondes et signaux
Les transformations chimiques
Constitution et transformation de la matière
L'énergie
Affiche tous les sujets
Le monde depuis 1945
Le xviiième siècle
Le xixème siècle
La guerre froide
Nouveaux enjeux et acteurs après la guerre froide
La méditerranée de l'antiquité au moyen-age
Le nouveau monde
Les religions du vième au xvème siècle
Une nouvelle guerre mondiale
La crise et la montée des régimes totalitaires
Les guerres mondiales
La france et la république
Le monde de l'antiquité
La 3ème république
Révolution et restauration
Affiche tous les sujets
Le mouvement
La génétique
Reproduction et comportements sexuels responsables
Diversité et stabilité génétique des êtres vivants
Transmission, variation et expression du patrimoine génétique
La cellule unité du vivant
Le monde microbien et la santé
La géologie
Corps humain et santé
Unité et diversité des êtres vivants
Procréation et sexualité humaine
Nutrition et organisation des animaux
Nourrir l'humanité : vers une agriculture durable pour l'humanité ?
La planète terre, l'environnement et l'action humaine
Affiche tous les sujets
Comment les économistes, les sociologues et les politistes raisonnent-ils et travaillent-ils ?
Quels sont les processus sociaux qui contribuent à la déviance ?
La coordination par le marché
Comment la socialisation contribue-t-elle à expliquer les différences de comportement des individus ?
Comment devenons-nous des acteurs sociaux ?
Comment crée-t-on des richesses et comment les mesure-t-on ?
La croissance économique
Quelles relations entre le diplôme, l'emploi et le salaire ?
Comment se forment les prix sur un marché ?
Comment s'organise la vie politique ?
La monnaie et le financement
Vote et opinion publique
Les sociétés developpées
Comment se construisent et évoluent les liens sociaux ?
Affiche tous les sujets
04/12/2022
2156
79
Partager
Enregistrer
Télécharger









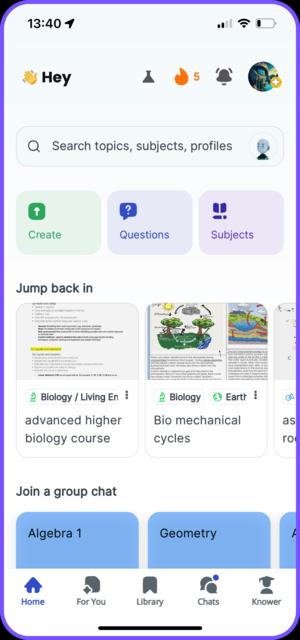
Le mouvement dans un champ de pesanteur Définir un mouvement Définir un mouvement Définition ● ● Système: objet étudié dont le mouvement est étudié Référentiel : endroit par rapport auquel on étudie le mouvement du système Référentiel Terrestre: objet fixe par rapport à la Terre Référentiel géocentrique : Centre de la Terre + 3 étoiles fixes Référentiel héliocentrique: centre du Soleil + 3 étoiles fixes Décrire un mouvement Trajectoire : rectiligne - circulaire - curviligne- parabolique Vitesse : accéléré - décéléré : accélération négative - uniforme Vecteur position Le vecteur position Dans un repère orthonormé, on définit le système par un point M grâce à un vecteur position OM qui donne ses coordonnées M, YM, ZM en fonction du temps : (x(t)) = x(t)i + y(t)j + z(t)k OM(t) y(t) z(t) Vecteur vitesse Le vecteur vitesse M,(t₁) Trajectoire OM, VX OM, M₂(t₂) Vecteur vitesse v(t): Variation du vecteur position dans le temps. Lorsqu'on fait tendre ce temps vers 0, cela correspond à la dérivée du vecteur position. On obtient une vitesse instantanée. ΔΟΜ At Norme: v = vx² + vy² + v₂² d'après Pythagore. v(t) Vecteur accélération d OM d.t Le vecteur accélération a(t) = *Vecteur accélération a(t): Variation du vecteur vitesse dans le temps. Lorsqu'on fait tendre ce temps vers 0, cela correspond à la dérivée du vecteur vitesse On obtient une accélération instantanée. dv dt At Caractéristiques: avec Norme: Origine : Le point M (avec OM le vecteur position) Direction et sens : Celui de Av Norme: || a2 + a² + a₂²...

Louis B., utilisateur iOS
Stefan S., utilisateur iOS
Lola, utilisatrice iOS
en m. s-2 Vx Calculer les vecteurs v'et a Vy Calculer une vitesse et une accélération Avec les équations horaires Rappel : = d OM dt [x(t) = v₂(t) = 2t OM y(t) = -5t² + 10t + 2 On dérive: vy(t) = -10t+10 z(t) = 3t+7 v₂(t) = 3 . ● Dériver un vecteur revient à dériver ses coordonnées. v=vx(t)i+vy(t)j +vz(t)k = 2ti − 10t + 10j +3k Vecteur vitesse et a = = 2t - 1 → Ainsi à t = 4s on a v=8i-30j + 3k a=a₂(t)i + ay(t)j + a₂(t)k Avec une chromatographie Formule : V4 = ● dv dt M3 M5 2T Tracer le vecteur vitesse : + M1 M3 M5 en m Ten s: le temps s'écoulant entre chaque intervalle. en m. s -1 On mesure M3 M4 + M4 M5 sur la feuille. On convertit en mesure réelle d'après l'échelle de dessin. + M2 Vecteur accélération On convertit le résultat en cm d'après l'échelle de vecteur et on le trace comme suit : Jar(t) = 2 aay(t) = -10 a₂(t) = 0 +M3 Tracer le vecteur variation de vitesse Δύ: Formule : Av₁ = V₁ - V V5 +M4 +M5 +M6 → Tracer le vecteur accélération : a = a est colinéaire à Av. ● On mesure Avqu'on a tracé. . tala On calcule l'accélération grâce à la formule Caractéristiques du vecteur vitesse instantané 2T On le trace suivant l'échelle vectorielle donnée : ● Sens : sens du mouvement Origine : ici V4 Direction: tangent à la trajectoire Base de Frenet AV 24 Norme: valeur de la vitesse trouvée avec la formule Mouvements circulaires : repère de Frenet Ce repère a pour origine le centre de gravité du système étudié et se déplace avec le mouvement de sorte que la trajectoire nous apparaisse rectiligne. On utilise deux autres vecteurs unitaires : Vecteur normal N perpendiculaire à la trajectoire. → Vecteur tangentiel T tangent à la trajectoire. Ainsi on a: [vr(t) V a →Jar(t) = ar an(t): r v² Dans le cas d'un mouvement circulaire et uniforme, v = constante donc ar(t) = 0 Newton Les forces UN (t) = 0 . = UT Principe d'inertie ● Isolé : Objet soumis à aucune force. Si les forces agissant sur un système ● pseudo -isolé : Objet soumis à des forces qui se compensent. sont nulles Alors le mouvement est : se compensent rectiligne uniforme immobile, Il se déplace à vitesse constante donc Av = 0 F=0 Deuxième loi de Newton ñ #physique #formule P ΣF=mxa Newton Force gravitationnelle FA/B = FB/A = G x MA MA C'est une force d'attraction. Chute libre A FA B/ Mouvement dans un champ de pesanteur uniforme X MB d² Trouver les équations horaires dans un champ de pesanteur uniforme On sait que P = m x get m x get [F=mxa AB Définition: Un objet qui n'est soumis qu'à son poids est un objet en chute libre Dans un repère (O,x,y): a A/B Donc : EF=P mxg=mx a g=a En chute libre l'accélération est égale à l'intensité de pesanteur. Jar(t) = 0 [ay(t) = -g тв Déterminer les équations horaires On jette un ballon avec un angle a dans un champ de pesanteur uniforme : g. L'objet est en chute libre: soumis qu'à son poids. D'après la Deuxième loi de Newton, on peut écrire a = g On peut donc écrire: (étant dans un repère plan) [ar(t) = 0 a cos(a) = -9 On intègre : OM on intègre v On sait que la projection de Vo sur l'axe des abscisse est égale au côté adjacent. adjacent hypothénuse OM OM → De même on sait que la projection de Vo sur l'axe des ordonnée est égale au côté opposé. donc opposé = sin(a) x hypothénuse = V₁ sin a x(t) sin(a) opposé hypothénuse Ce sont les conditions initiales où t = 0 donc const = Vo cos a et const' = V₁ sin a H Comme avant on a cherché les conditions initiales pour trouver la valeur des ces constantes OM*(0) = 0 [y(t) = H [x(t) = V₁ cosa x t |y(t) = 1 791² 2 donc adjacent = cos(a) x hypothénuse = V₁ cos a [v₂ (t) = const Vo cos a [vy(t) = −gt + const' = −gt + Vo sin a [x(t) = = Vo cos a x t + const 1 {y(t) = −gt² + Vo sina x t + const' Vo a = V₁ cos a x t donc t sachant que tan a = + Vo sin a xt + H Equation de la trajectoire On a l'ordonnée y en fonction de l'abscisse x, on veut exprimer y(t) en fonction de x(t). Sæ(t) = Vo cosa x t 1 [y(t) = −gt² + Vo sin a × t + H 2 sin a cos a 1 y(t) = −gt² + V₁ sina × t + H donc y(x) X Vo cos a 1 x =-=—79(² -)² + V₁ sina x Vo cos a X Vo cos a + g on a y(x (t)) 2 × V²(cosa)² x C'est une parabole : ax² + bx+c Energie cinétique Energie cinétique Ec= 1 x mx v² 2 Théorème de l'énergie cinétique Lorsqu'un système se déplace d'un point A à un point B sa vitesse n'est pas forcément constante AEC(A→B) On peut donc se servir de ce théorème pour calculer la vitesse d'un objet à un point B au lieu d'utiliser les équations horaires. Energie potentielle = ECB - ECA =EWAB (F) Energie potentielle x x² + tanaxx + H Ep = mxgx z Travail Lorsqu'un système se déplace son altitude n'est pas forcément constante. Variation et travail du poids AEp = Ep - Epa = mxgx zb-mxgx Za AEP = -WAB (P) Travail du poids AWAB (P) = mx g× (Za — Zb) De cette façon, si l'objet monte, le travail est négatif, si l'objet descends, le travail est positif. Le poids est une force conservative, elle ne dépend pas de AB mais de (za - Zb) Travail d'une force → →→ Le travail d'une force F est établie par le produit scalaire: WAB(F) = F. AB WAB (F): = F x AB x cos(F; AB) en joule Différents angles Le travail peut-être : moteur nul résistant Energie mécanique ● Energie mécanique Em Ec+ Ep Lorsque le système n'est soumis qu'à : Cos(180)=négatif des forces conservatives Sens du mouvement des forces dont le travail est nul A Cos(90)=0 Cos (0)=positif On dit que l'énergie mécanique se conserve : AEm = 0 donc que Ema Em Théorème de l'énergie mécanique AEM (A+B) = ΣWAB (F) non conservative